Control systems
Scilab provides standard algorithms and tools for control system study.
Transfer function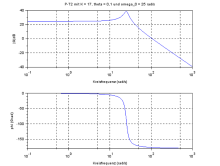
With a classical example of a second order system (for example of mechanical spring-mass-system).
We conclude the following transfer:
![]()
From the following differential equation:
![]()
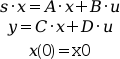
State-space representation
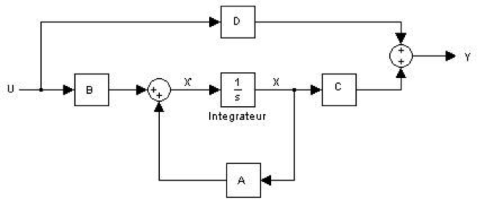
syslin(dom,A,B,C,D,x0)
represents the system:
Further features:
- Classic and robust control
- Stability analysis
See also:
Tutorials:
- Introduction to control systems
- Controller for an inverted pendulum