Xcos
Dynamic systems modeler and simulator in discrete and continuous time domains
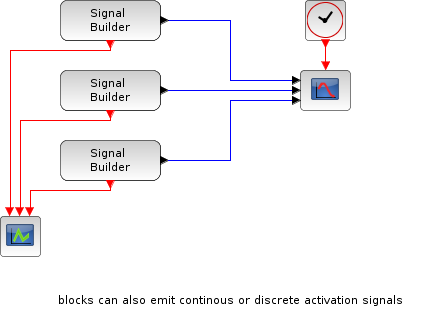
Xcos is a graphical editor to design hybrid dynamical systems models. Models can be designed, loaded, saved, compiled and simulated.
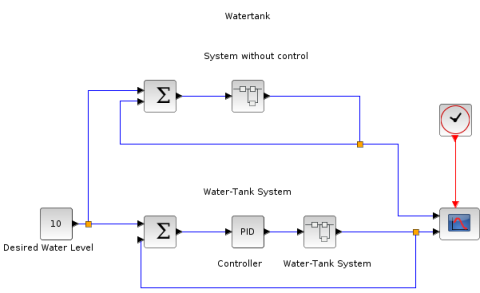
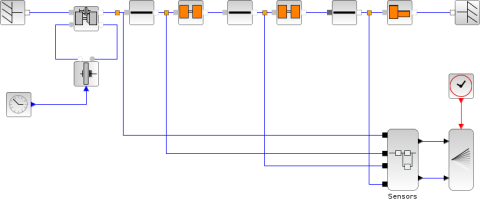
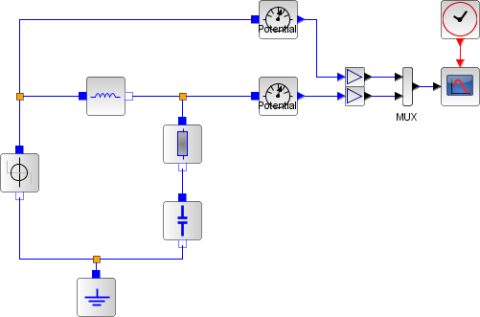
Ergonomic and efficient solution for industrial and academics needs, Xcos provides functionalities for modeling of mechanical systems (automotive, aeronautics…), hydraulic circuits (dam, pipe modeling…), control systems, etc.
Xcos is freely available and distributed with Scilab.